|
|

|

|
| e-Pub |
Section: New Results
Haptic Cueing for Robotic Applications
Wearable Haptics
Participants : Marco Aggravi, Claudio Pacchierotti.
We worked on developing a novel modular wearable finger interface for cutaneous and kinesthetic interaction [11], shown in Fig. 9. It is composed of a 3-DoF fingertip cutaneous device and a 1-DoF finger kinesthetic exoskeleton, which can be either used together as a single device or separately as two different devices. The 3-DoF fingertip device is composed of a static body and a mobile platform. The mobile platform is capable of making and breaking contact with the finger pulp and re-angle to replicate contacts with arbitrarily oriented surfaces.
|
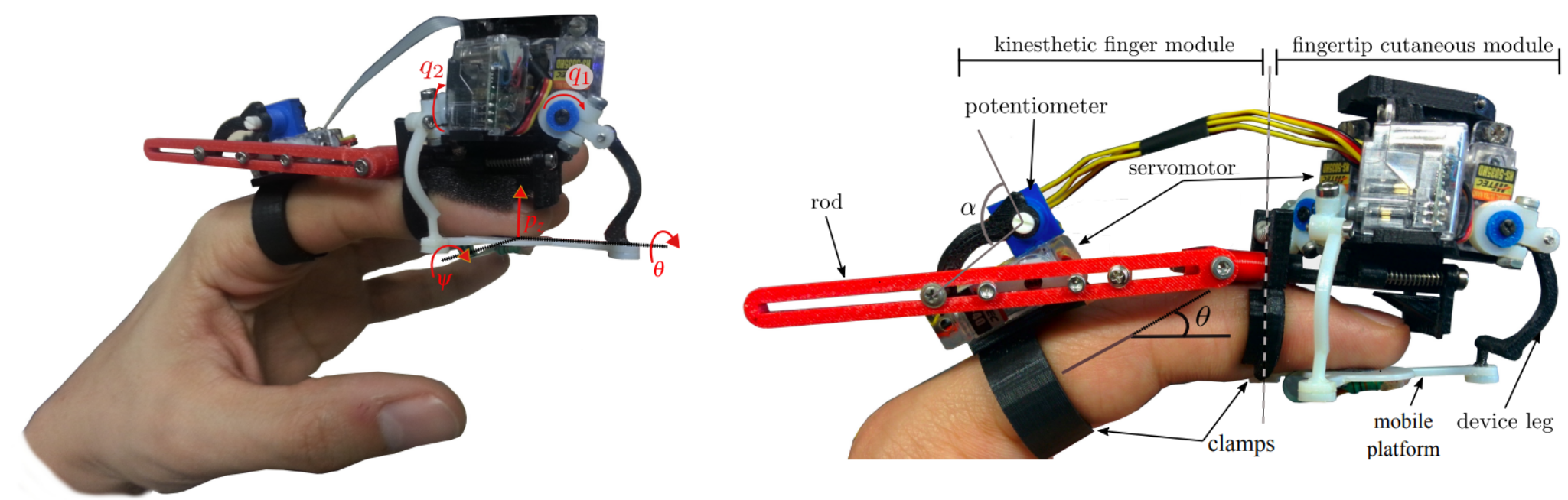
The 1-DoF finger exoskeleton provides kinesthetic force to the proximal and distal interphalangeal finger articulations using one servo motor grounded on the proximal phalanx. Together with the wearable device, we designed three different position, force, and compliance control schemes. We also carried out three human subjects experiments, enrolling a total of 40 different participants: the first experiment considered a curvature discrimination task, the second one a robotassisted palpation task, and the third one an immersive experience in Virtual Reality. Results showed that providing cutaneous and kinesthetic feedback through our device significantly improved the performance of all the considered tasks. Moreover, although cutaneous-only feedback showed promising performance, adding kinesthetic feedback improved most metrics. Finally, subjects ranked our device as highly wearable, comfortable, and effective.
On the same line of research, this year we guest edited a Special Issue on the IEEE Transactions on Haptics [26]. Thirteen papers on the topic have been published.
Mid-Air Haptic Feedback
Participants : Claudio Pacchierotti, Thomas Howard.
GUIs have been the gold standard for more than 25 years. However, they only support interaction with digital information indirectly (typically using a mouse or pen) and input and output are always separated. Furthermore, GUIs do not leverage our innate human abilities to manipulate and reason with 3D objects. Recently, 3D interfaces and VR headsets use physical objects as surrogates for tangible information, offering limited malleability and haptic feedback (e.g., rumble effects). In the framework of project H-Reality (Sect. 8.3.5), we are working to develop novel mid-air haptics paradigm that can convey the information spectrum of touch sensations in the real world, motivating the need to develop new, natural interaction techniques.
In this respect, we started working on investigating the recognition of local shapes using mid-air ultrasound haptics [45]. We have presented a series of human subject experiments investigating important perceptual aspects related to the rendering of 2D shapes by an ultrasound haptic interface (the Ultrahaptics STRATOS platform). We carried out four user studies aiming at evaluating (i) the absolute detection threshold for a static focal point rendered via amplitude modulation, (ii) the absolute detection and identification thresholds for line patterns rendered via spatiotemporal modulation, (iii) the ability to discriminate different line orientations, and (iv) the ability to perceive virtual bumps and holes.
Our results show that focal point detection thresholds are situated around 560Pa peak acoustic radiation pressure, with no evidence of effects of hand movement on detection. Line patterns rendered through spatiotemporal modulation were detectable at lower pressures, however their shape was generally not recognized as a line below a similar threshold of approx. 540Pa peak acoustic radiation pressure. We did not find any significant effect of line orientation relative to the hand both in terms of detection thresholds and in terms of correct identification of line orientation.
Tangible objects in VR and AR
Participant : Claudio Pacchierotti.
Still in the framework of the H-Reality project (Sect. 8.3.5), we studied the role of employing simple tangible objects in VR and AR scenarios, to improve the illusion of telepresence in these environments. We started by investigating the role of haptic sensations when interacting with tangible objects. Tangible objects are used in Virtual Reality to provide human users with distributed haptic sensations when grasping virtual objects. To achieve a compelling illusion, there should be a good correspondence between the haptic features of the tangible object and those of the corresponding virtual one, i.e., what users see in the virtual environment should match as much as possible what they touch in the real world. For this reason, we aimed at quantifying how similar tangible and virtual objects need to be, in terms of haptic perception, to still feel the same [40]. As it is often not possible to create tangible replicas of all the virtual objects in the scene, it is indeed important to understand how different tangible and virtual objects can be without the user noticing. Of course, the visuohaptic perception of objects encompasses several different dimensions, including the object's size, shape, mass, texture, and temperature. We started by addressing three representative haptic features - width, local orientation, and curvature, - which are particularly relevant for grasping. We evaluated the just-noticeable difference (JND) when grasping, with a thumb-index pinch, a tangible object which differ from a seen virtual one on the above three important haptic features. Results show JND values of 5.75%, 43.8%, and 66.66% of the reference shape for the width, local orientation, and local curvature features, respectively.
As we mentioned above, for achieving a compelling illusion during interaction in VR, there should be a good correspondence between what users see in the virtual environment and what they touch in the real world. The haptic features of the tangible object should – up to a certain extent – match those of the corresponding virtual one. We worked on an innovative approach enabling the use of few tangible objects to render many virtual ones [41]. Toward this objective, we present an algorithm which analyses different tangible and virtual objects to find the grasping strategy best matching the resultant haptic pinching sensation. Starting from the meshes of the considered objects, the algorithm guides users towards the grasping pose which best matches what they see in the virtual scene with what they feel when touching the tangible object. By selecting different grasping positions according to the virtual object to render, it is possible to use few tangible objects to render multiple virtual ones. We tested our approach in a user study. Twelve participants were asked to grasp different virtual objects, all rendered by the same tangible one. For every virtual object, our algorithm found the best pinching match on the tangible one, and guided the participant toward that grasp. Results show that our algorithm was able to well combine several haptically-salient object features to find corresponding pinches between the given tangible and virtual objects. At the end of the experiment, participants were also asked to guess how many tangible objects were used during the experiment. No one guessed that we used only one, proof of a convincing experience.
Wearable haptics for an Augmented Wheelchair Driving Experience
Participants : Louise Devigne, François Pasteau, Marco Aggravi, Claudio Pacchierotti, Marie Babel.
Smart powered wheelchairs can increase mobility and independence for people with disability by providing navigation support. For rehabilitation or learning purposes, it would be of great benefit for wheelchair users to have a better understanding of the surrounding environment while driving. Therefore, a way of providing navigation support is to communicate information through a dedicated and adapted feedback interface.
We then envisaged the use of wearable vibrotactile haptics, i.e. two haptic armbands, each composed of four evenly-spaced vibrotactile actuators. With respect to other available solutions, our approach provides rich navigation information while always leaving the patient in control of the wheelchair motion. We then conducted experiments with volunteers who experienced wheelchair driving in conjunction with the use of the armbands to provide drivers with information either on the presence of obstacles. Results show that providing information on closest obstacle position improved significantly the safety of the driving task (least number of collisions). This work is jointly conducted in the context of ADAPT project (Sect. 8.3.6) and ISI4NAVE associate team (Sect. 8.4.1.1).